Leonid Keselman
I am a PhD student at the Robotics Institute, part of the School of Computer Science at Carnegie Mellon University,
where I work on 3D computer vision. My PhD advisor is Martial Hebert.
From 2011 to 2017, I worked at Intel, as part of Intel RealSense. I primarily designed computer vision algorithms for efficient hardware
ASICs, including the Intel RealSense R200 and D400 RGB-D sensors. Additionally,
I worked on software APIs, active illumination systems, human-computer interaction devices,
and helped develop demos for trade shows, including CES 2012-2016.
I have an MS in Computer Science (AI focus) from Stanford University, where I was a research assistant for Silvio Savarese and a teaching assistant
for Fei-Fei Li (CS131 & CS231N). I have a BS in EECS from UC Berkeley,
where I worked in Kris Pister’s lab.
Email /
GitHub /
Google Scholar /
LinkedIn
|

|
Research
I’m interested in computer vision, machine learning, optimization, graphics and robotics.
|

|
Flexible Techniques for Differentiable Rendering with 3D Gaussians
Leonid Keselman, Martial Hebert
arXiv, 2023
arxiv /
code /
website /
We show how shape reconstruction with 3D Gaussians can be expanded to include differentiable optical flow, colored mesh exports and more.
|
|
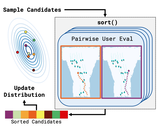
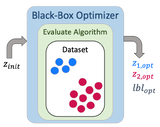
Optimizing Algorithms From Pairwise User Preferences
Leonid Keselman, Katherine Shih, Martial Hebert, Aaron Steinfeld
International Conference on Intelligent Robots and Systems, 2023
arxiv /
code /
website /
We show how to perform efficient black-box optimization of algorithm configuration from user preferences. Results include Intel RealSense stereo cameras and a robot social navigation policy.
|
|
Discovering Multiple Algorithm Configurations
Leonid Keselman, Martial Hebert
International Conference on Robotics and Automation, 2023
arxiv /
code /
website /
youtube /
We show the benefits of discovering an ensemble of configurations for a given algorithm during the course of optimization. Results on stereo, planning and visual odometry.
|

|
Fuzzy Metaballs: Approximate Differentiable Rendering with Algebraic Surfaces
Leonid Keselman, Martial Hebert
European Conference on Computer Vision (Oral), 2022
arxiv /
code /
website /
youtube /
An approximate differentiable renderer for a compact, interpretable representation, which we call Fuzzy Metaballs. Our approximate renderer focuses on rendering shapes via depth maps and silhouettes. It sacrifices fidelity
for utility, producing fast runtimes and high-quality gradient information that can be used to solve vision tasks.
|

|
Venue Analytics: A Simple Alternative to Citation-Based Metrics
Leonid Keselman
ACM/IEEE Joint Conference on Digital Libraries, 2019
arxiv /
code /
slides /
website /
A bibliometric/scientometric project. Our main two results are a method of assigning value to all venues in computer science and a method to organize them into distinct subfields, all without using citation data. The resulting
venue scores can be used to rank universities’ by scholarly output, and produce a responsive author-level metric.
|

|
Direct Fitting of Gaussian Mixture Models
Leonid Keselman, Martial Hebert
Computer and Robot Vision Conference, 2019
arxiv /
code /
slides /
website /
A formulation for fitting Gaussian Mixture Models (GMMs) directly to geometric objects, such as a triangular mesh. This method produces more robust results and produces an improvement in 3D registration for both meshes and
RGB-D frames.
|

|
Intel RealSense Stereoscopic Depth Cameras
Leonid Keselman, John Iselin Woodfill, Anders Grunnet-Jepsen, Achintya Bhowmik
CVPR Workshops (Computational Cameras and Displays), 2017
arxiv /
Technical and design details of the Intel RealSense R200 and D400 series
|

|
Rigid-body Dynamics for Articulated Mesh Tracking
Leonid Keselman, Sterling Orsten, Stan Melax
CVPR Workshops (HANDS), 2015
slides /
An invited talk for the HANDS 2015 workshop at CVPR 2015. This includes further details about the efficiency of our rigid-body solver, our machine-learning
tools, and some details about our data annotation process.
|

|
Dynamics Based Hand Tracking
Stan Melax, Leonid Keselman, Sterling Orsten
Graphics Interfaces, 2013
arxiv /
code /
Using a physics engine (e.g. a dynamics solver) to track 3D articulated objects in real-time.
|
|
Dynamics Based Hand Tracking
Stan Melax, Leonid Keselman, Sterling Orsten
ACM SIGGRAPH Symposium on Interactive 3D Graphics and Games, 2013
poster /
A tracking algorithm that was real-time on a consumer laptop. Won Best Poster Award.
|
Intel Projects
Besides my work on the RealSense depth sensors and the publications above, a sampling of my publicly disclosed work
|

|
Intel RealSense 400
Intel
2016-08-15
My responsibilities included system performance, components of the stereo algorithm on the imaging ASIC, and contributions to the design of laser projector pattern.
|

|
Compact VCSEL Projector
Intel
2016-06-27
patent /
patent #2 /
patent #3 /
A low-cost dense, configurable projector system for RGB-D depth sensors.
|
|
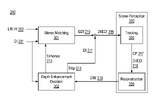
Depth Image Enhancement
Intel
2015-08-06
patent /
Algorithms to filter, enhance and clean-up RGB-D data streams.
|

|
Real-time Box Measurement
Intel
2015-04-08
video /
video #2 /
Using a single depth sensor, real-time detection of cuboids, accurate estimation of their dimensions, and even some bin-packing.
|
|
DashPoint: A low-cost, low-power human interface device
Intel
2013-06-07
patent /
patent #2 /
Finger tracking on a microcontroller, with optics tricks and some HCI ideas
|
|
Stereoscopic depth reconstruction with probabilistic pixel correspondence search
Intel
2012-07-24
patent /
A fast method for performing stereo depth maps.
|
Other Projects
These include coursework, side projects and unpublished research work.
|

|
Dice Stacking: A Dynamic Manipulation Task
CMU 16-741 Mechanics of Manipulation
2018-12-05
paper /
video /
code /
With Hunter Goforth, we designed a manipulation task and solved it with imitation learning.
|

|
Introspective Neural Networks
CMU 16-824: Visual Learning and Recognition
2018-05-15
paper /
Using pre-trained neural networks to improve fine grained recognition via style transfer.
|

|
Stochastic Sampling of Parametric Policies
CMU 16-745: Dynamic Optimization
2018-05-05
paper /
Using a very simple algorithm to solve some very simple environments
|
|
Optimizing for Physical Simulation
CMU 16-745: Dynamic Optimization
2018-03-22
code /
With Chris Atkeson and Alex Spitzer. Using optimizers to match an observed trajectory.
|

|
A Maze Bot
Stanford CS225A: Experimental Robotics
2017-06-12
paper /
video /
video #2 /
Making a 6-DoF PUMA arm solve a maze with real-time vision and tracking.
|
|
Learning Implicit Communication Strategies
Stanford CS234: Deep Reinforcement Learning
2017-06-10
Work with Aaron Goodman on used reinforcement learning to discover implicit collusion strategies in the context of an iterated prisoner’s dilemma.
|

|
Computational models for text summarization
Stanford CS224N: Natural Language Processing
2017-03-18
paper /
video /
code /
poster /
Work with Ludwig Schubert on simplified encoders stages for text summarization.
|
|
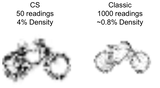
Superresolution Micrscopy
Stanford CS371: Computational Biology in Four Dimensions
2017-03-16
code /
slides /
An implementation of Faster STORM using compressed sensing.
|

|
Automatically building Restaurant Ontologies
Stanford CS270: Modeling Biomedical Systems
2017-03-15
paper /
poster /
Using the Yelp dataset of reviews to model the semantics and relationships between cuisines, businesses and other properties useful for restaurant recommendations.
|

|
Beyond Correlation Networks for the Financial Market
Stanford CS224W: Social and Information Network Analysis
2016-12-07
paper /
Using graph models, we track the development of financial networks over the 20th century.
|
|
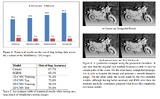
Gradient-learned Models for Stereo Matching
Stanford CS231A: Computer Vision, From 3D Reconstruction to Recognition
2016-06-07
paper /
code /
Some re-implementations of standard stereo correspondence algorithms, along with experiments using classification for stereo matching.
|

|
Multimodal Natural Language Inference
Stanford CS224U: Natural Language Understanding
2016-06-06
paper /
video /
We explored how natural language inference tasks can be augmented with visual data.
|
|
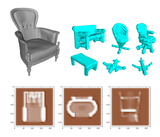
CNNs for 3D Model Classification
Stanford CS231n: Convolutional Neural Networks for Visual Recognition
2016-03-08
paper /
poster /
3D shape classification by learning an embedding function into a 2D image and using a pre-trained ImageNet network. At the time, got state-of-the-art results for single-view classification on ShapeNet40.
|

|
Wide-angle Stereo Lenses
Stanford CS448I: Computational Imaging and Display
2016-03-07
paper /
poster /
We introduce various projection functions in the analysis of stereoscopic depth sensors.
|

|
Doctor Bayes
Stanford CS221: Artificial Intelligence
2015-12-12
website /
paper /
code /
poster /
Detecting disease from a short description of symptoms. In some small testing, obtained nearly 90% top 5 accuracy and about 60% top 1 accuracy
|
|
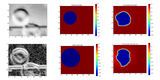
Level-set based tracking and segmentation
Stanford CS279: Structure and Organization of Biomolecules and Cells
2015-12-04
paper /
code /
We implemented a detection and deformable tracking pipeline for red blood cells.
|
|
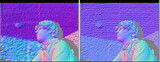
Dequantization of Depth Data
Other
2015-04-22
code /
An O(1) time algorithm for producing smooth normals for quantized data, such as the Kinect.
|
|
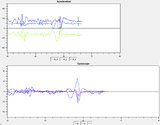
Golf swing monitoring
Other
2011-07-21
Work with Ankur Mehta, built a demonstration platform that used wireless low-weight, low-cost sensor platforms to monitor a golf swing.
|
|
Project Tetra: Collaborative robot state estimation
UC Berkeley EE149: Embedded Systems
2011-07-21
With Humphrey Hu, Ryan Julian, and Eric Yuan, a project to show the efficacy of multiple-robot collaborative state estimation. Using Wiimote cameras, mobile robot platforms, and real-time wireless communication.
|
|
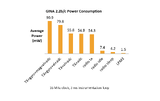
GINA: Low power design
UC Berkeley
2010-08-22
For testing and validating the functionality of the GINA (Guidance and Inertial NAvigation) mote, a 1.6 gram sensor platform.
|

|
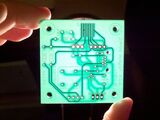
GINA: Wireless sensor platform
UC Berkeley
2010-06-22
I helped Anita Flynn and Thomas Watteyne build these small sensors and wrote firmware.
|
|
